![]() 『水晶振動子内蔵型』リアルタイムクロック(RTC)モジュール の 内部構造 とメリット
『水晶振動子内蔵型』リアルタイムクロック(RTC)モジュール の 内部構造 とメリット
水晶振動子内蔵RTCモジュールの内部構造
・水晶振動子とRTC-ICが立体的にハウジングされるため底面積が大幅に削減されます。
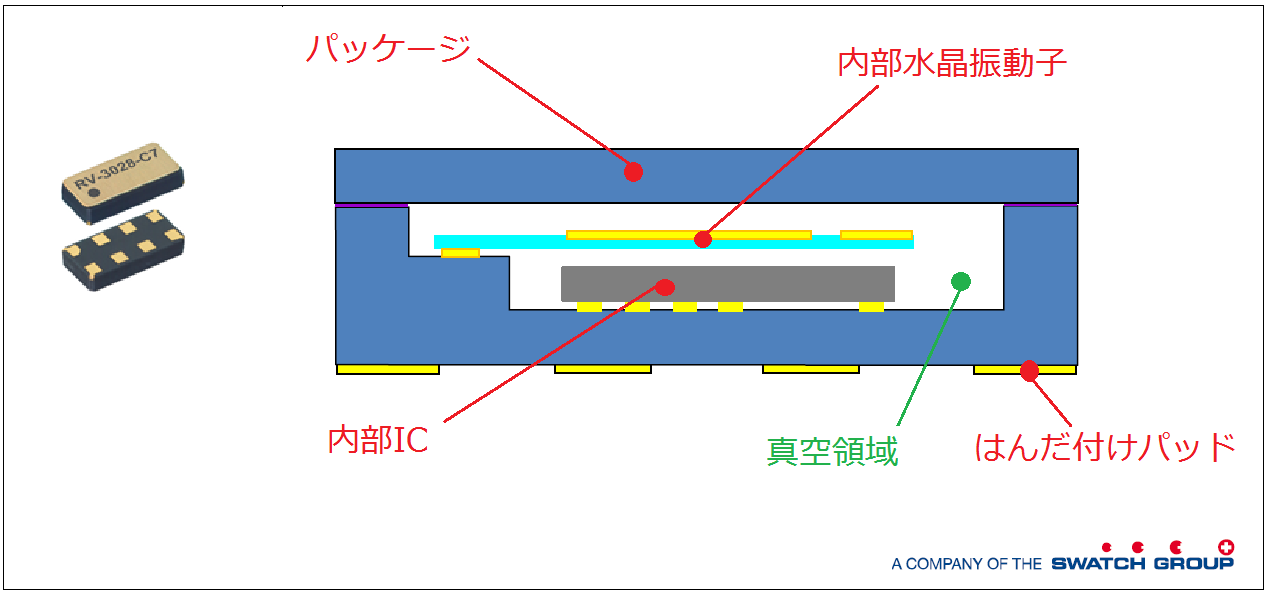
・信頼性の高いセラミックパッケージを採用。パッケージ内部は真空に保たれています。
水晶振動子内蔵リアルタイムクロクモジュールのメリット
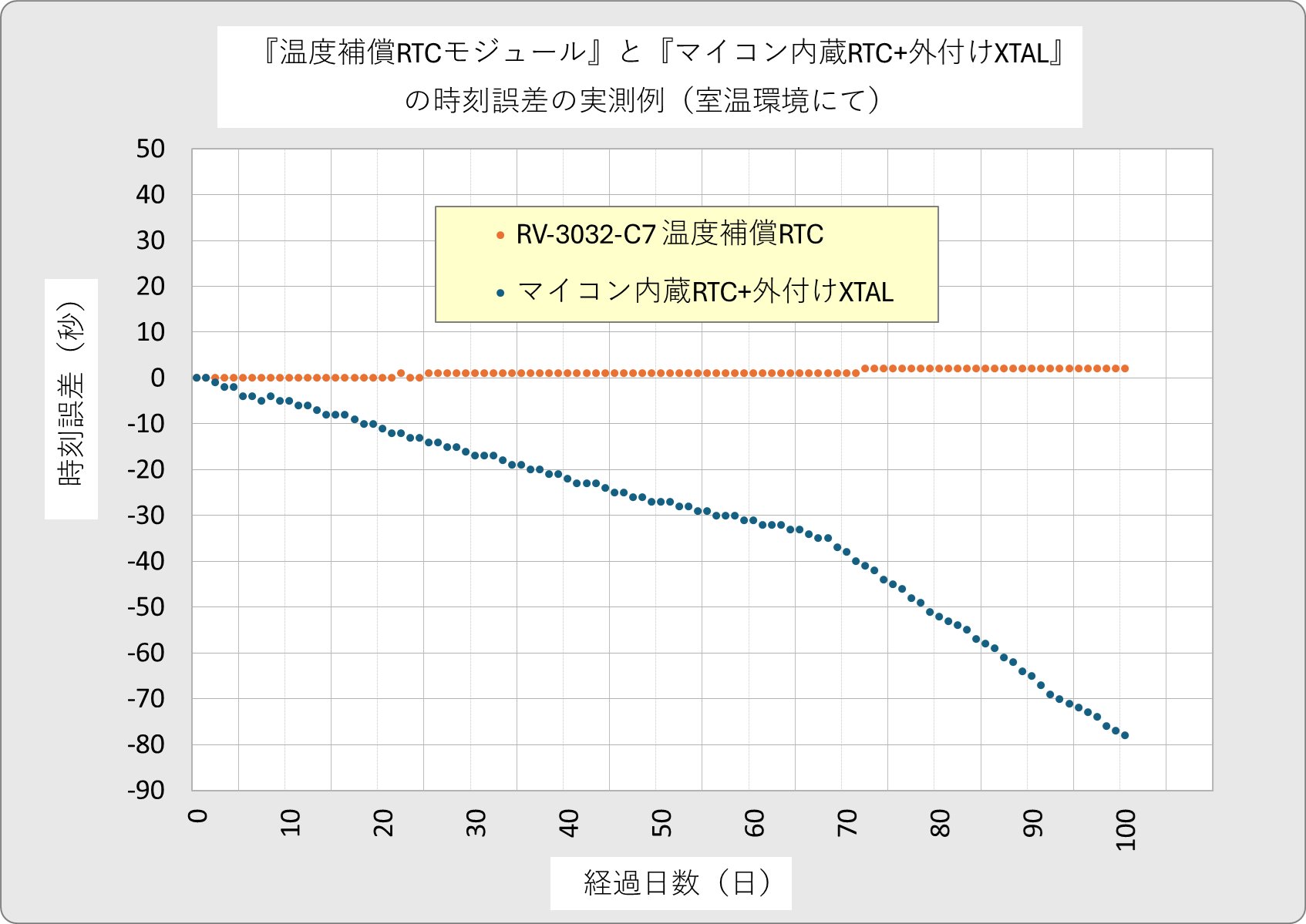
・時刻誤差を大幅に改善出来ます
・モジュール製造時に内部の水晶振動子の調整を行うためマッチング誤差がありません。
・周辺部品(コンデンサの誤差)の影響がありません。
・基板汚染の影響がありません。
→ 同じ±20ppmの規格でも振動子外付けより高精度に
↓ ユーザー調整不要の高精度温度補償タイプはさらに高精度に時刻を保持します ↓
 ★機器の時刻ずれの問題を
★機器の時刻ずれの問題を
『高精度温度補償のRTCモジュール』にてリーズナブルに解決できます。
・高精度でユーザー様サイドでの調整は不要
・超小型で水晶振動子を内蔵
・低消費電流
さらにタイマ・アラーム・時刻更新の基本機能に加えて、外部イベント検出・
タイムスタンプ・1/100秒カウンタ等を備えており、機器の機能拡張も図れます。
◆高精度温度補償RTCモジュール(XTAL内蔵)◆
・RV-8803-C7 .... I2C, ±1.5ppm(0〜+50℃)/±3.0ppm(-40〜+85℃)
・RV-3032-C7 .... I2C, ±2.5ppm(-40〜+85℃)
・設計工数を大きく削減
・水晶振動子とマイコン・周辺回路部品とのマッチング調整の確認が不要になります。
・マッチングエラーのリスクが無くなります。
・待機時の消費電流の削減
・バックアップ時の消費電流が小さくなります(0.05〜0.25μA/機種による)
→ バックアップ電源の持ち時間を長くすることが出来ます。
・タイマ割り込み機能によりマイコンのオンオフをコントロールしてシステム全体の消費電流を削減
→ 『RV-3028-C7』を用いたWSNアプリケーションでのシステムの低消費電流化について
・基板上の配置場所が自由に
・マイコンから離れている場所にも配置することが出来ます。
→ 水晶振動子のようにマイコンに直近に設置する必要はありません。
・付加機能の追加
・多彩な付加機能=タイマー/アラーム/時刻更新割り込み/低電圧検出は全ての機種に備わっています。
・その他、機種により外部イベント検出割り込み/タイムスタンプ機能/温度センサ機能 などの付加機能が備わっています。
<関連情報>
・リアルタイムクロック(RTC)モジュールの Q&A
・リアルタイムクロック(RTC)モジュールの主な機能
・水晶振動子内蔵リアルタイムクロック(RTC)モジュールのメリット
・リアルタイムクロック(RTC)モジュールの時計精度の計算について(月差・日差)
・リアルタイムクロック(RTC)モジュールの接続回路例(電源切替機能付き 及び 電源切替機能無しタイプ別)
・リアルタイムクロック(RTC)モジュールのバックアップ電源自動切替機能について
・型番毎の消費電流について (RV-8803-C7, RV-3028-C7, RV-8263-C7での実測例)
・リアルタイムクロック(RTC)モジュールのバックアップ電池について(一次リチウムコイン電池・電気二重層・全固体電池)
・高精度/温度補償リアルタイムクロック(RTC)モジュールの温度特性
・I2Cインターフェースについて
・リナックスドライバのダウンロード